ニュース / News
ニュースリリース
自動運転における重大な問題をシミュレーションで検出する技術を開発
~問題が発生するかを探り、起こりうる問題だけを効率的に自動探索~
情報・システム研究機構 国立情報学研究所(NII、所長:喜連川 優、東京都千代田区)のアーキテクチャ科学研究系准教授 石川 冬樹らの研究チームは、科学技術振興機構(JST、理事長:濵口 道成、東京都千代田区)の戦略的創造研究推進事業 ERATO蓮尾メタ数理システムデザインプロジェクト(*1)(ERATO MMSD、研究総括:NIIアーキテクチャ科学研究系准教授 蓮尾 一郎)のもと、自動運転システムのシミュレーションにおいて、急加速や急ハンドルが起きているなど事故につながるような複合的で重大な問題が発生するシミュレーションシナリオを効率よく自動で見つける技術を開発しました。
本手法では、シミュレーションの試行を繰り返す中で、追い越しや右折などのシナリオごとに起こりえない問題を見つけて不要なシミュレーション試行を除外することで、重大な問題が起きるような本当に重要なシナリオ、例えばあまりにも強い加速と急ハンドルが同時に発生するなどの状況を効率的に見つけ出すことができます。
本研究成果は、ソフトウェア工学における自動化についてのフラッグシップ国際会議ASE 2021(*2)で2021年11月16日(オーストラリア時間)に発表されます。
背景
自動車の自動運転機能や運転支援機能に対する社会の期待を受け、特定の状況では運転手が注意を払わなくてもよい「レベル3」と呼ばれる自動運転機能を備えた車種も現れつつあります。しかし、現在取り組まれている自動運転は、高速道路の渋滞時や、ある定められたルートなどに限られています。そのため、市街地など交通状況の変化が大きな環境での自動運転の実用化には、さらなる安全性・信頼性の向上が求められます。これを受けて、ERATO MMSDプロジェクトでは、ますます重要となるシミュレーションの活用において、これまでに自車に起因して衝突など危険な状況が発生するシナリオを探索・検出する技術(*3)や、検出した衝突に対して要因を説明する技術(*4)、検出した衝突を防ぐように自動運転車の振る舞いを修正する技術(*5)、衝突などはないが強い加速が起きるなど特徴的な運転行動が起きる状況を見つける技術(*6)の開発にも取り組んできました。
自動運転の信頼性を高めるには、他車や歩行者の周辺状況などを踏まえ、自車が進行すべき方向や速度を更新し続ける機能(経路計画と呼ばれます)が非常に重要となります。この機能では、他車や歩行者にぶつからないという安全性はもちろんのこと、加減速や曲がり方の度合い、走行レーン遵守など複数の観点を踏まえて進行方向や速度を決めていく必要があります。
そのため、自動運転車の振る舞いに対するシミュレーターを用いた検査が盛んに行われています。シミュレーターを用いた自動運転機能のテストでは、「右折時に対向車が来る」など、考えられるシナリオを幅広く洗い出す必要があります。例えば、同じ右折時でも、対向車を通り過ぎるのを待ってから右折するのか、対向車が来る前に加速して曲がるのかなど、非常に多様な交通状況で、自動運転機能がとりうる振る舞いにより重大な問題が発生しないか、しっかりと検査しなければなりません。ここでの問題とは、事故が起きる状況はもちろんのこと、快適さを損なうような急加速や急ハンドル、スムーズな通行を妨げる過度な低速走行など、複数の観点を考える必要があります。
しかし、交差点右折などの一つのシナリオにおいて、他車の配置などのシミュレーション設定には非常に膨大な可能性があります。人が事故を想定して設定を行ってみたり、ランダムな設定を多数生成したりしても、ほとんどの場合、問題が発生するようなシミュレーション設定を検出できません。特に「あまりにも強い加速と急ハンドルが同時に発生する」など、複数種類の問題が複合的に発生することで重大な状況に至るシミュレーション設定を見つけるのは困難です。加えて、追い越しをするシナリオでは横方向への急な移動は発生しないなど、本質的に起こりえない現象もあります。このため、「追い越しのシナリオで横方向の強すぎる加速を起こしてみよう」、「右折のシナリオで速度超過を起こしてみよう」といったように、シナリオごとにそれぞれむやみにすべて問題の可能性を探索しても、無駄にシミュレーション回数が膨大になってしまうことになります。
研究手法・成果
本研究では、特定の問題が起こる可能性が低い場合は、そのことを見抜きつつ、「あまりにも強い加速」や「衝突あるいは衝突に近い状況」といった問題、さらにはそれら複数の問題(現実に起こる可能性が高い問題)を引き起こすようなシミュレーション設定を効率よく検出する技術の開発に取り組みました。これにより、これまでの研究に対してさらに、より重要なテストを効率よく見つけることを可能にしたと言えます。
基本的なアプローチとして、進化計算(*7)と呼ばれる最適化技術を用いることにより、シミュレーションの試行を繰り返し、探索の目的となっている問題が起きるようにシミュレーション設定を調節していきます。本研究のポイントは、この探索に対する目的設定を、探索結果を踏まえて自動で随時設定し直しながら探索を反復することで、問題が複合的に起きるなどのより重大な状況を効率よく検出する点にあります。
まず対象システムにとって最も重大な問題から探索を始めます。衝突が起きる状況、さらにはそれに速度超過や急ハンドルも複合的に関わる状況を最も重大と考え、それらの状況に至るシミュレーション設定の探索から始めます。ある程度の探索を行ったところで、探索の目標設定に対する見直しを行います。その際には、まだ探索を試みていない問題も重視しつつ、これまでの探索結果を踏まえて、起こりうる重大な問題を探索するように探索の目的を再設定します。具体的には、十分探索したにもかかわらず特定の問題が見つからなかった場合、その種類の問題については探索の優先度を下げます。一方で、これまで探索をそれほど試みていない問題や、これまでに検出した状況に近いがより重大な問題の可能性が考えられる場合については、優先度を上げて探索していきます。このように目的の見直しを随時行っていくことにより、追い越しや右折などの対象シナリオの性質をとらえることができるようになり、そのシナリオでは起こりえない種類の問題を生成しようとして無駄な計算に時間を割くことがなくなりました。それにともない、「あまりにも強い加速」や「衝突あるいは衝突に近い状況」といった問題が複合的に起きるようなより重大な状況を、効率的にシミュレーションから検出できるようになりました。
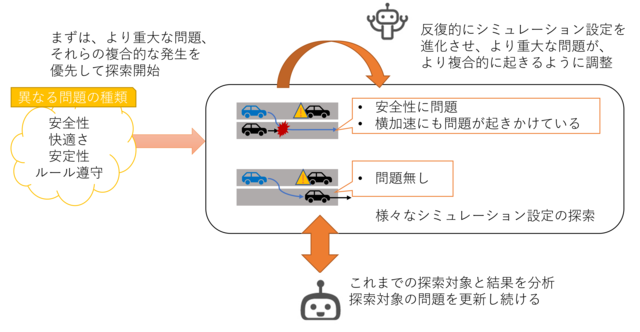
<図>提案手法によるシミュレーション設定探索の仕組み
本研究のテスト生成技術は、マツダ株式会社から提供された経路計画プログラム(*8)に対して適用し、シミュレーションで実証しました。今回開発した技術により、効率よく、複数種類の問題が複合的に発生するなど重大な問題に対するシミュレーション設定を得ることに成功しました。
今後の展望
今までにERATO MMSDプロジェクトが取り組んできた技術は、安全性や「良い」運転の基準の決め方など、各自動車会社のニーズや適用環境に合わせて広く利用できる技術となっています。例えば安全性評価に関する特定の基準として、各シナリオで自動運転車の挙動が満たすべき責務を定めたRSS(Responsibility-Sensitive Safety)の枠組み(インテル社による策定事例など)(*9)に技術を適合・準拠させることも可能です。今後は、国際的な標準化動向や各自動車会社のニーズを踏まえて、安全性の評価観点や適用環境に応じたカスタマイズを通して技術を具体化し、広く応用例として展開していきたいと考えています。
石川 冬樹准教授からのコメント:
「ERATO蓮尾メタ数理システムデザインプロジェクトでは、マツダ株式会社から提供された研究用の経路計画プログラムに対して多くの取り組みを行ってきました。その中のテスト・デバッグ技術に関する研究では、従来のソフトウェアプログラムに対する技術を発展・適合させることで、本ニュースリリースの技術を含め、役割の異なる一連の技術をまとめてきました。これらの技術の特徴は、「欲しいテスト」や「欲しい修正処置」といったニーズに対応する解を探索することです。今後は、最新の標準化動向や、自動運転技術の適用先によって異なるニーズを踏まえ、開発した技術を大きく展開・実証していきたいと考えています。また同プロジェクトと並行して実施しているeAIプロジェクト(*10)と連携し、経路計画側だけでなくセンシング(物体検知)の失敗に起因する問題を扱うような拡張も行っていきます。」
研究プロジェクトについて
本研究は科学技術振興機構 戦略的創造研究推進事業 ERATO蓮尾メタ数理システムデザインプロジェクト(JPMJER1603)の一環で行われました。本研究では、マツダ株式会社から提供された経路計画プログラムを用いています。
論文タイトルと著者
- タイトル:Targeting Requirements Violations of Autonomous Driving Systems by Dynamic Evolutionary Search
- 著者:Yixing Luo, Xiao-Yi Zhang, Paolo Arcaini, Zhi Jin, Haiyan Zhao, Fuyuki Ishikawa, Rongxin Wu, Tao Xie
- 発表会議:The 36th IEEE/ACM International Conference on Automated Software Engineering (ASE 2021)
- 発表日:2021年11月16日(火)口頭発表予定(オーストラリア時間)
関連リンク
- ERATO蓮尾メタ数理システムデザインプロジェクト
- The 36th IEEE/ACM International Conference on Automated Software Engineering (ASE 2021)
ニュースリリース(PDF版)
自動運転における重大な問題をシミュレーションで検出する技術を開発
~問題が発生するかを探り、起こりうる問題だけを効率的に自動探索~
- (*1)ERATO蓮尾メタ数理システムデザインプロジェクト:国立研究開発法人 科学技術振興機構(JST)の「戦略的創造研究推進事業ERATO」に採択されている研究プロジェクトで、Society 5.0の大きな柱となるCPSの品質保証手法の学術的研究を推進している。特に、CPSの典型例の一つとして注目される自動運転システムを重点応用対象として、その信頼性保証を支えるモデリング手法・形式検証手法・テスト手法、さらにこれらを包括する実用的な V&V 技術の研究開発に取り組んでいる。このような大きなチャレンジでは、ソフトウェア・制御・AI といった多様な学術分野の協働が必要となるため、学術分野融合の基礎となる数理的(メタ)理論も重視して研究を推進する。略称はERATO MMSD。プロジェクト詳細はhttps://www.jst.go.jp/erato/hasuo/ja/参照。
- (*2)ASE 2021 : The 36th IEEE/ACM International Conference on Automated Software Engineering。COREと呼ばれる計算機科学系の国際会議ランキングにて最高のA*ランク。
- (*3)Alessandro Calò, Paolo Arcaini, Shaukat Ali, Florian Hauer, Fuyuki Ishikawa, Generating Avoidable Collision Scenarios for Testing Autonomous Driving Systems, The 13th IEEE International Conference on Software Testing, Verification and Validation (ICST 2020 Industry Track), pp.375-386, March 2020
2020年3月のニュースリリースを参照: https://www.nii.ac.jp/news/release/2020/0323.html - (*4)Xiao-Yi Zhang, Paolo Arcaini, Fuyuki Ishikawa, Kun Liu, Investigating the Configurations of an Industrial Path Planner in Terms of Collision Avoidance, The 31st International Symposium on Software Reliability Engineering (ISSRE 2020, Research Track - Practical Experience Reports), pp.301-312, October 2020
- (*5)Alessandro Calò, Paolo Arcaini, Shaukat Ali, Florian Hauer, Fuyuki Ishikawa, Simultaneously Searching and Solving Multiple Avoidable Collisions for Testing Autonomous Driving Systems, The Genetic and Evolutionary Computation Conference (GECCO 2020), pp.1055–1063, July 2020
- (*6)Paolo Arcaini, Xiao-Yi Zhang, Fuyuki Ishikawa, Targeting Patterns of Driving Characteristics in Testing Autonomous Driving Systems, IEEE International Conference on Software Testing, Verification and Validation (ICST 2021 Industry Track), April 2021
2021年4月のニュースリリースを参照: https://www.nii.ac.jp/news/release/2021/0412.html - (*7)進化計算:遺伝子の突然変異や交配のような生物の進化過程のような反復改善の仕組みを計算機内で実現することで、より最適な解を得る技術の総称。
- (*8)本研究で考案したモデルは研究評価用のプロトタイプであり、特に、その品質は最終的な製品の品質には何ら関係ありません。
- (*9)Responsibility-Sensitive Safety:自動運転システムが遵守すべき最低限のルールを定めるもので、IEEE (Institute of Electrical and Electronics Engineers) における標準化が検討されている。
- (*10)eAIプロジェクト: JSTにおける「未来社会創造事業 サイバー世界とフィジカル世界を結ぶモデリングとAI 超スマート社会の実現」に採択されている研究プロジェクトで、自動運転をはじめとして深層学習技術を用いたAIシステムの安全性・信頼性確保・向上のため、細やかなニーズに応えるAIの構築や修正が可能な技術に取り組む。正式名称は「機械学習を用いたシステムの高品質化・実用化を加速する"Engineerable AI"技術の開発」 https://engineerable.ai/
※本発表は、科学技術振興機構との共同発表です。
 国立情報学研究所 研究教育職員 募集
国立情報学研究所 研究教育職員 募集 NII Today No.107
NII Today No.107 国立情報学研究所 2026年度 概要
国立情報学研究所 2026年度 概要 情報研シリーズ 「ディープフェイク 生成AIとの共棲に向けて」
情報研シリーズ 「ディープフェイク 生成AIとの共棲に向けて」 NIIサービスニュース
NIIサービスニュース SINET広報サイト
SINET広報サイト ウェブサイト「軽井沢土曜懇話会アーカイブス」を公開
ウェブサイト「軽井沢土曜懇話会アーカイブス」を公開 SINETStream 事例紹介:トレーラー型動物施設 [徳島大学 バイオイノベーション研究所]
SINETStream 事例紹介:トレーラー型動物施設 [徳島大学 バイオイノベーション研究所] 学術研究プラットフォーム紹介動画
学術研究プラットフォーム紹介動画 教育機関DXシンポ
教育機関DXシンポ