研究 / Research
JST さきがけ
国が定める戦略目標の達成に向けて、独創的・挑戦的かつ国際的に高水準の発展が見込まれる先駆的な目的基礎研究を推進します。科学技術イノベーションの源泉となる成果を世界に先駆けて創出することを目的とするネットワーク型研究(個人型)です。
信頼されるAIの基盤技術
頑健性と安全性の性能限界を明らかにする深層強化学習
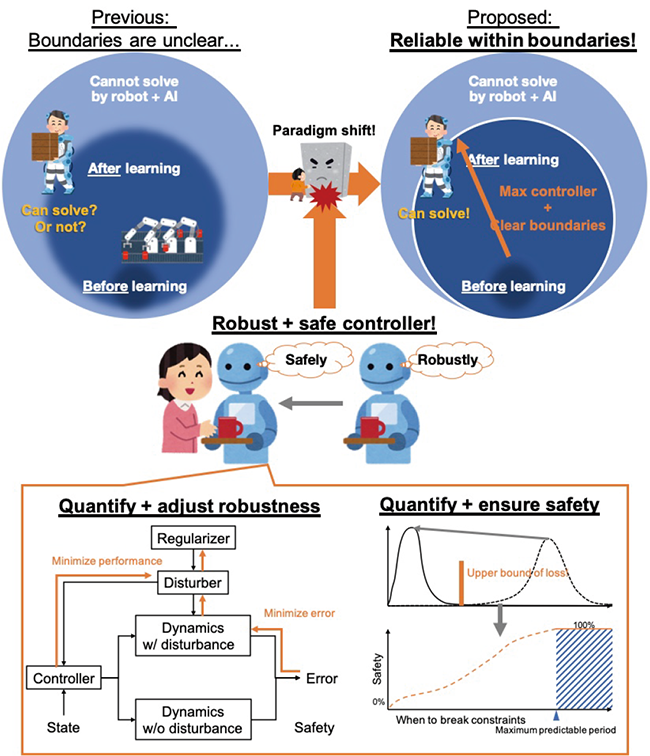
ロボットを巧みに動かせる深層強化学習技術が近年発展を遂げているが、それを制御器として見た場合の信頼性は不十分と言える。
特に、考え得る最悪ケースに対処できるかを示す頑健性と、ロボットの持つ制約条件を満足できるかを示す安全性については、個別に研究され改善する技術は提案されているが、包括的に扱った研究は非常に限られている。
それにもかかわらず、これら2つの信頼性の指標を闇雲に改善・達成しようとすると、例えばロボットから人への物体の手渡しのようなシナリオであれば、最悪ケースを過度に考慮しすぎて人とぶつからないという制約条件を厳密に満たせないと誤認してしまう事態が生じ得る。
つまり、頑健性と安全性に関する現状の技術は容易に干渉し合い所望の作業を破綻させ得るものであり、本来であれば包括的に考慮する技術が不可欠である。
そこで本研究では,安全性を最優先に達成すべきものとしつつ、干渉問題で所望の作業が破綻しない範囲で可能な限り頑健性を高める技術を開発している。
また、深層強化学習で獲得された制御器がどの程度頑健なのか・安全なのかを定量的に評価することで、その制御器が扱える問題・作業内容を明確化することを目指している。
具体的には、最悪ケースを確率分布の裾として適切に表現可能な学習則・確率モデルや、実時間で安全な準最適解を発見する最適制御アルゴリズムなどを開発し、ロボットでの実証実験を進めている。
IoTが拓く未来
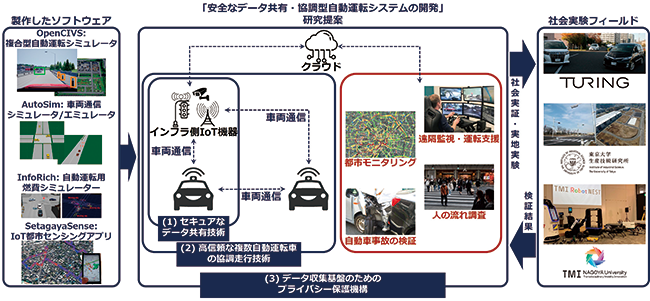
安全なデータ共有・協調型自動運転システムの開発
様々なIoTセンサ群・通信機器を有した自動運転システムに関する技術開発が進んでいる一方、自動運転システムのIoTセンサ群からのリアルタイムデータ・蓄積データの利活用はほとんど進んでいない。
これは自動運転システムがカメラ・GPS受信機・LiDAR等多種センサを有しているため、走行中に周囲の人間のプライバシーに関する情報を収集してしまうことに主な原因があった。
また自動運転システムは人命に直接関わるIoT制御システムであり、高い信頼性・安全性を常に担保する必要があり、データ活用まで見据えたシステム設計が難しいことも現実的な原因であったと言える。
これらの問題を解決し、自動運転システムを未来社会のセンサデータ収集基盤として用いるために、本さきがけ研究提案では「データ共有・協調型自動運転システムの開発」に取り組んでいる。
具体的には、(1)インフラ側IoT機器・他車両とのセキュアなセンサデータ共有技術、(2)複数自動運転システムの衝突・デッドロックを高信頼で回避する協調走行技術、(3)自動運転システムを安心してデータ収集基盤として用いるためのプライバシー保護機構の3つの研究テーマに取り組み、インフラ側IoT機器・周辺の他車両・遠隔の一般ユーザと安全・安心・高信頼にデータ共有・協調する自動運転システムの実現を目指して開発・設計を行っている。
本研究の遂行によって、走行データ・センサデータをリアルタイムに共有し、自動運転システム自身の安全だけでなく、都市交通全体の安全性・利便性及び都市生活の快適性・生活環境を飛躍的に高める自動運転システムの構築が期待できる。
 国立情報学研究所
国立情報学研究所 国立情報学研究所 2025年度 概要
国立情報学研究所 2025年度 概要 NII Today No.104
NII Today No.104 SINETStream 事例紹介:トレーラー型動物施設 [徳島大学 バイオイノベーション研究所]
SINETStream 事例紹介:トレーラー型動物施設 [徳島大学 バイオイノベーション研究所] ウェブサイト「軽井沢土曜懇話会アーカイブス」を公開
ウェブサイト「軽井沢土曜懇話会アーカイブス」を公開 情報研シリーズ これからの「ソフトウェアづくり」との向き合い方
情報研シリーズ これからの「ソフトウェアづくり」との向き合い方 学術研究プラットフォーム紹介動画
学術研究プラットフォーム紹介動画 教育機関DXシンポ
教育機関DXシンポ 高等教育機関におけるセキュリティポリシー
高等教育機関におけるセキュリティポリシー 情報・システム研究機構におけるLGBTQを尊重する基本理念
情報・システム研究機構におけるLGBTQを尊重する基本理念 オープンサイエンスのためのデータ管理基盤ハンドブック
オープンサイエンスのためのデータ管理基盤ハンドブック 教育機関DXシンポ
教育機関DXシンポ コンピュータサイエンスパーク
コンピュータサイエンスパーク