ニュース / News
ニュースリリース
それぞれに異なる動きで効率的な出会い ―あらゆる1対1の遭遇の最適化に応用可能―
概要
どのように動けば、効率よく目的の物を見つけることができるのか。これはランダム探索問題と呼ばれ、動物の探索行動だけでなく、タンパク質の運動から群ロボット、迷い人捜索に至るまで幅広い現象で生じる問題です。これまでの探索理論の研究は、餌を探索する動物がどれだけ多くの餌を得られるか、といった探索者の利益のみを考えるものが大半でした。このため、本研究で取り上げた動物のオスとメスのように、互いの位置情報を持たないが、探索して出会わなければならない状況での効率の良い探索戦略についての知見はほとんどありませんでした。
国立情報学研究所(NII)ビッグデータ数理国際研究センターの阿部 真人特任研究員と水元 惟暁 京都大学農学研究科博士後期課程学生(日本学術振興会特別研究員DC1)、土畑重人同助教の研究グループは、オスとメスが互いに探索しあう状況を想定した理論モデルを構築し、探索時間が限られている時にはオスとメスで異なる動き方をするのが双方にとって最適であることを発見しました。また、生物進化を模倣したシミュレーションを行うことで、動き方に性差が生まれることを示しました。
今回の研究成果は、ランダム探索問題に双方の利益という視点を導入した点において重要な意味を持ちます。本研究成果は5月10日、英国王立協会の学術誌『Journal of the Royal Society Interface』に掲載されました。
研究者からのコメント 「探索問題は、人を含めた動物行動における普遍的な問題であること、さらに分子運動や工学などの応用にも直結する幅広い問題です。単純な問題でありながら、異なる動き方が効率がよいなど、現実の生物の動き方の複雑さを説明できること、さらに共通の探索戦略の法則が生物個体だけでなく、分子から人工物にまでも共通することが面白いと考えています。今回の研究では、探索者のみの利益を考えていた先行研究で明らかになった最適戦略をオスとメス両方が示すことが同様に最適かと思っていました。しかし、研究の結果、互いに他の条件は同一であるにも関わらず、動き方が異なる方が最適になる点が驚きでした」(阿部真人NII特任研究員)
1.背景
有性生殖において最も重要なプロセスの一つに、オスとメスの出会いがあります。性的二型や性フェロモンなど、生物は出会いの効率を上げるために様々な形質を進化させてきました。本研究では、出会いが生じる上での前提となる「動き」に注目しました。他の全ての条件を同じとした時に、オスとメスが異なる動きをすることで、出会いの効率を上げることができるならば、これが新たな性的な違いを生み出す機構になりうると考えました。
目的物の位置情報がない時の効率的な探索手法を考えるランダム探索問題の一つの答えはLévy walk(図1)という移動パターンです。頻繁に生じる短い直線移動と、稀に生じる長い直線移動からなるパターンで、直線移動の距離の分布が裾野の広いべき分布に従い、直線移動間の角度は一様分布に従います。べき分布の傾き(μ)の違いにより図のように様々な移動パターンを示します。進行方向はランダムに選ばれても、進む距離が短いものから長いものまで生じるため効率よく広い範囲を探索できるというもので、実際にミツバチやアホウドリといった多くの動物の動きがこのパターンを示すことが報告されています。これまでの研究で様々な条件下でのLévy walkの効率が調べられてきましたが、これらのほとんどは、探索する捕食者がどれだけの多くの餌を得られるかという探索者の利益のみを考えるものでした。そのため、オスとメスが互いに探索しあう配偶者探索における探索戦略についてはほとんど知見がありませんでした。
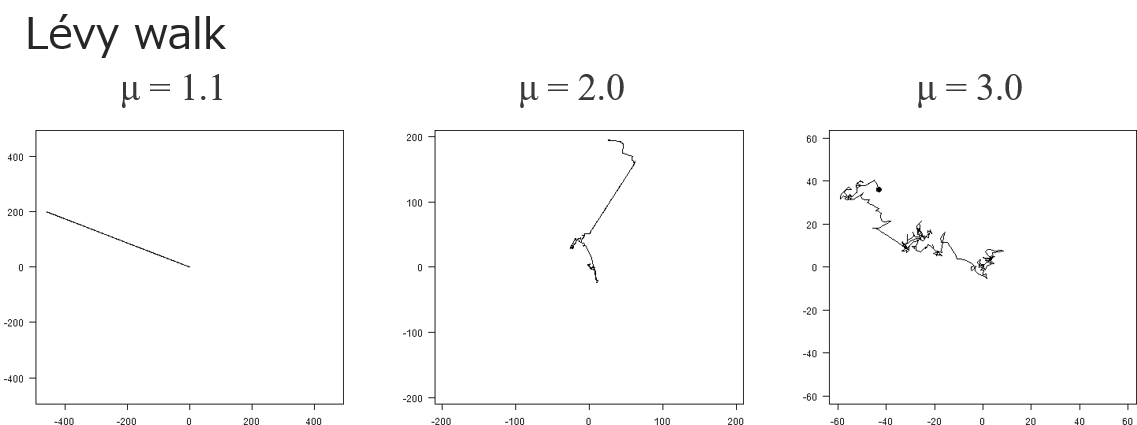
図1: Lévy walkの例。同じ時間内に、最初の地点から、µ=1.1ではµ=3の10倍遠くまで移動したことが分かる。
2.研究手法・成果
そこで本研究では、オスとメスがそれぞれの動きのパターンで探索しペアが生じたものから探索をやめる、相互探索の状況を考えたシミュレーションモデルを構築しました(図2)。動きのパターンにはLévy walkを用いて様々なものを用意しました。そして、限られた制限時間内でそれぞれの動きのパターンをしたオスとメスが出会えたかどうかで、探索効率を計測しました。
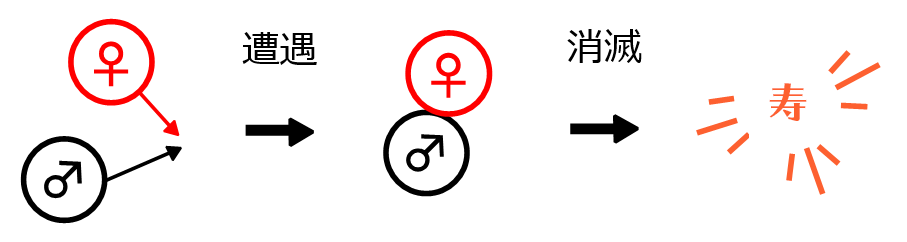
図2: 今回想定した状況。オスとメスが互いを探索し、出会いが生じると探索をやめその場から消滅する。
まず、最も単純な状況として、1次元空間に1個体のオスとメスがいる状態を考えてシミュレーションを行ったところ、制限時間が短い時には、拡散的な(直線的に動いた)ペアが最大効率に達し、制限時間が長い時には、非拡散的な(頻繁に方向転換した)ペアが最大効率を得ました。一方、制限時間が中間的な時には、中間の拡散性を持つペアではなく、拡散的な個体と非拡散的な個体とのペアが最大効率に達しました(図3)。また、2次元空間に複数個体がいる状況に拡張しても制限時間が中間的な時には、集団内に拡散的な個体と非拡散的な個体がいる場合にオス、メスともに最大効率を得ることを確認しました。
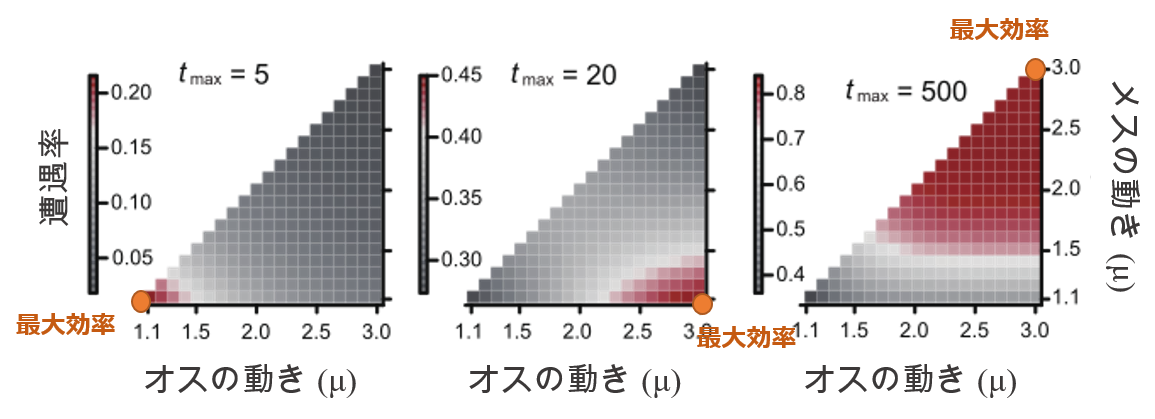 図3: 相互探索シミュレーションの結果。色が赤い部分が、高い遭遇率を示す。制限時間(tmax)が中間の時、性的に異なる動きをするペアが、遭遇率を最大化できる。
図3: 相互探索シミュレーションの結果。色が赤い部分が、高い遭遇率を示す。制限時間(tmax)が中間の時、性的に異なる動きをするペアが、遭遇率を最大化できる。
探索時間が限られている時には、探索者は発見速度と正確性の両方のバランスをとる必要があるため、このような結果になると考えました。発見速度と正確性はトレードオフの関係にあるため、制限時間が短い時にはオスもメスも発見速度を高めるように拡散的な動きをし、制限時間が長い時には正確性を高めるために非拡散的な動きをします。制限時間が中間的な時には、この両方が求められるため、オスとメスは異なる動きをすることによってバランスよく効率性と正確性を得ることで遭遇効率を上げることが出来ます。
さらに、制限時間内に出会えたペアのみが子供を残せると仮定して進化シミュレーションを行いました。その結果、最初は同じ動きをしていたオスとメスが、徐々に違うパターンの動きをするように進化していく過程を観察することができました(図4)。
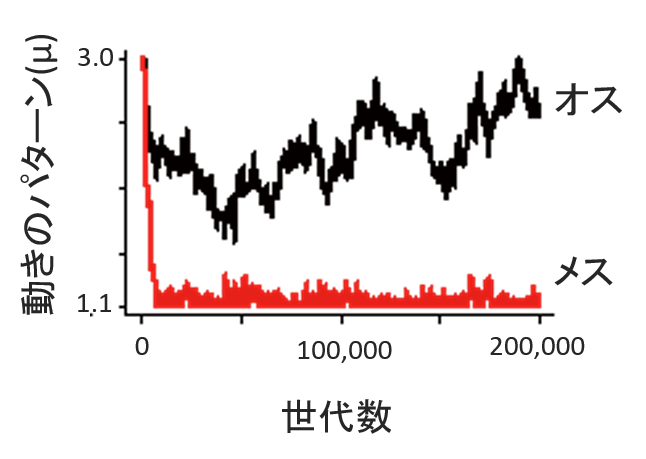 図4: 進化シミュレーションの結果。世代を重ねることで、オスとメスが異なる動きをするように進化していく。オスとメスとは置き換え可能。
図4: 進化シミュレーションの結果。世代を重ねることで、オスとメスが異なる動きをするように進化していく。オスとメスとは置き換え可能。
3.波及効果、今後の予定
本研究により、動きのパターン以外のものがすべて同じであると仮定したとしても、オスとメスが異なるように動くことが最適な探索戦略になり得るという新規の理論を確立することが出来ました。この理論が自然界でどのように機能しているかは、性的に同形な動物の動きのパターンやその個体にとって探索可能な時間を調べることによって実証していこうと考えています。例えばシロアリの探索は、本研究で示した状況と非常に近いため、調査を進めていく予定です。配偶者探索の他にも、タンパク質の動きから群ロボット、迷い人捜索に至るまであらゆる1対1の出会いの効率化に応用できると考えています。
また、本研究では探索者のみの利益を考えていた先行研究に対して、オスとメスの両方が探索者であり目的物である配偶者探索を調べました。その結果、どちらか一方の効率のみを考えていては見つけることができなかった動きの違いが最適化につながるという発見に至りました。探索問題を考える上では、双方の利益を考える必要があることを示した点も重要な意味を持っているでしょう。
4.研究プロジェクトについて
本研究はJST, ERATO, 河原林巨大グラフプロジェクト(グラント番号:JPMJER1201)(*1) の支援を受けました。また、JSPS科研費JP15H068302(*2)、JP15J027673(*3)、JP15K186094(*4)、JP268910155(*5)の助成を受けたものです。
<論文タイトルと著者>
- 論文タイトル: Optimizing mating encounters by sexually dimorphic movements
- 著者: Nobuaki Mizumoto, Masato S Abe, Shigeto Dobata
- 掲載誌名: Journal of the Royal Society Interface
(*2)「JSPS科研費JP15H06830」: 研究活動スタート支援「動物行動の定量データ取得アルゴリズムの開発と順位行動の長期動態解析」。研究代表者:阿部真人。https://kaken.nii.ac.jp/grant/KAKENHI-PROJECT- 15H06830/。
(*3)「JSPS科研費JP15J02767」: 特別研究員奨励費「シロアリの建設行動を用いた自己組織化システムの適応進化の検証」。研究代表者:水元惟暁。https://kaken.nii.ac.jp/ja/grant/KAKENHI-PROJECT-15J02767/。
(*4)「JSPS科研費JP15K18609」: 若手研究(B)「実験進化による非社会性昆虫への利他性創出」。研究代表者:土畑重人。https://kaken.nii.ac.jp/ja/grant/KAKENHI-PROJECT-15K18609/。
(*5)「JSPS科研費JP26891015」: 研究活動スタート支援「社会的ジレンマによる進化的分岐とその反復様式の解明:社会進化と種分化の接点を探る」。研究代表者:土畑重人。https://kaken.nii.ac.jp/ja/grant/KAKENHI-PROJECT-26891015/。
※本件は京都大学との共同発表です。メディアに対して5月9日に事前の情報提供を行っています。
 NIIサービスキャラバン2026
NIIサービスキャラバン2026 NII Today No.107
NII Today No.107 国立情報学研究所 2026年度 概要
国立情報学研究所 2026年度 概要 情報研シリーズ 「ディープフェイク 生成AIとの共棲に向けて」
情報研シリーズ 「ディープフェイク 生成AIとの共棲に向けて」 NIIサービスニュース
NIIサービスニュース SINET広報サイト
SINET広報サイト ウェブサイト「軽井沢土曜懇話会アーカイブス」を公開
ウェブサイト「軽井沢土曜懇話会アーカイブス」を公開 SINETStream 事例紹介:トレーラー型動物施設 [徳島大学 バイオイノベーション研究所]
SINETStream 事例紹介:トレーラー型動物施設 [徳島大学 バイオイノベーション研究所] 学術研究プラットフォーム紹介動画
学術研究プラットフォーム紹介動画 教育機関DXシンポ
教育機関DXシンポ