Research
Japan Science and Technology Agency (JST) PRESTO:
[Trustworthy AI] The Fundamental Technologies for Trustworthy AI
Deep reinforcement learning to determine robustness and security performance limits
Principal Investigator:KOBAYASHI Taisuke, Principles of Informatics Research Division, Assistant Professor
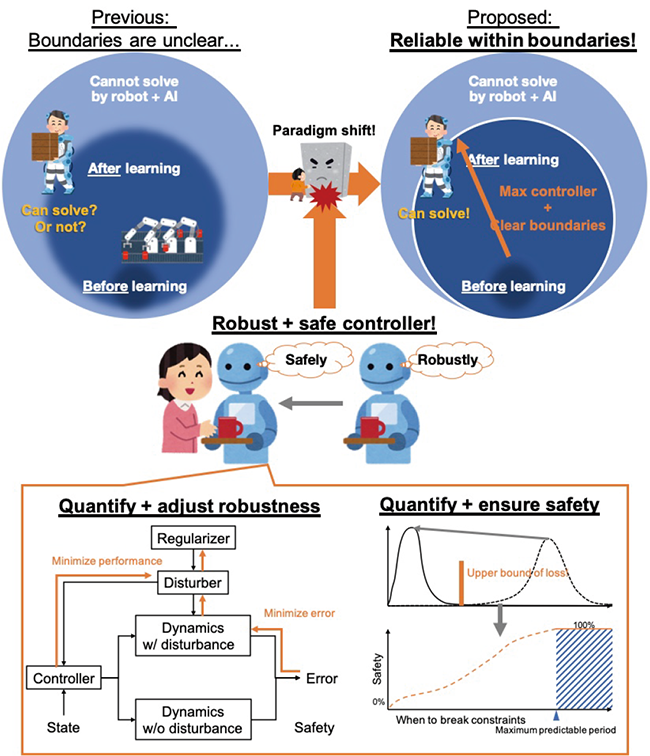
In recent years, advances in deep reinforcement learning have made it possible to move robots in a skillful manner, but the technology remains insufficiently reliable for use in controllers. Research focused on two particularly difficult allenges--robustness, or the ability of a robot to deal with worst-case scenarios, and safety, the ability to satisfy the onstraints of a robot--has led to proposals of techniques for improvement, but comprehensive studies of the technology have been very limited. Nevertheless, any haphazard attempt to achieve or improve these two indicators of reliability is likely to result in errors. For example, in the scenario where a robot hands an object to a person, giving excessive consideration to the worst-case scenario can result in mistakenly assuming that the constraint condition of "not colliding with a person" cannot be strictly satisfied. In other words, current techniques for achieving robustness and safety can easily interfere with each other, resulting in a failure to achieve the desired result. Therefore, a method that comprehensively considers both is needed. This study aims at developing a technique for maximizing robustness, without interference problems causing the desired task to fail, while at the same time making safety the highest priority. Furthermore, the robustness and safety of controllers developed through deep reinforcement learning are quantitatively evaluated, to clarify the problems and the kinds of tasks that a controller can handle. More specifically, the aim is to develop learning rules and probabilistic models that can appropriately express worst-case scenarios as the tail of a probability distribution and optimal control algorithms for discovering safe suboptimal solutions in real time. The results are tested in demonstration experiments with robots.
[IoT] Future Led by IoT
Security and Privacy for Cooperative Autonomous Vehicles
Principal investigator: AOKI Shunsuke, Assistant Professor, Information Systems Architecture Science Research Division
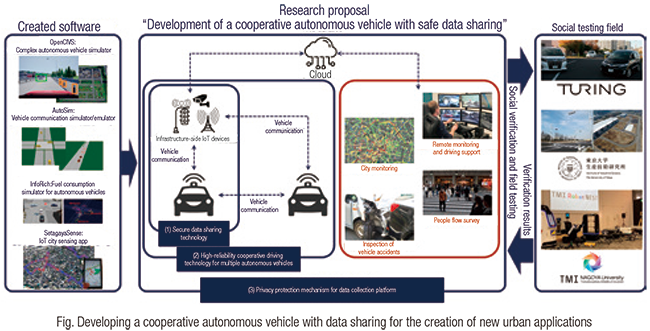
While the development of technologies for autonomous vehicles that make use of various IoT sensors and communication devices has advanced rapidly, little progress has been made in utilizing the real-time data and stored data from IoT sensors in such systems. The main reason is that since autonomous vehicle systems are equipped with cameras, GPS receivers, and many kinds of sensors such as LiDAR, they collect privacy-sensitive information about people around the vehicle during operation. Furthermore, since autonomous vehicles are IoT control systems that put human life at risk directly, a high level of reliability and safety must be assured at all times. It is therefore difficult to design a system that takes data utilization fully into account.
To solve this problem and thus enable the use of autonomous vehicles as a sensor data collection platform for a future society, this PRESTO research proposal tackles the "development of a cooperative autonomous vehicle with safe data sharing." The project focuses on three specific research themes: (1) secure sensor data sharing technology with infrastructure-side IoT devices and other vehicles; (2) cooperative driving technology to avoid collisions and deadlocks of multiple autonomous vehicles for high reliability; and (3) a privacy protection mechanism to ensure that autonomous vehicles can be used as a secure data collection platform. Like this, the study aims at developing and designing autonomous vehicle systems capable of safely, securely, and reliably sharing data and cooperating with infrastructure-side IoT devices, other vehicles in the vicinity, and remote general users.
The study is expected to construct an autonomous vehicle system that shares driving data and sensor data in real time and dramatically improves not only the safety of the system itself, but also the overall safety and convenience of urban transportation, as well as the comfort and living environment of urban life.
 Summary of NII 2024
Summary of NII 2024 NII Today No.101(EN)
NII Today No.101(EN) SINETStream Use Case: Mobile Animal Laboratory [Bio-Innovation Research Center, Tokushima Univ.]
SINETStream Use Case: Mobile Animal Laboratory [Bio-Innovation Research Center, Tokushima Univ.] NII Today No.100(EN)
NII Today No.100(EN) Guidance of Informatics Program, SOKENDAI 23-24
Guidance of Informatics Program, SOKENDAI 23-24 The National Institute of Information Basic Principles of Respect for LGBTQ
The National Institute of Information Basic Principles of Respect for LGBTQ DAAD
DAAD