Dec. 2019No.86
Interview
ロボット研究のこれまでとこれから
社会に役立つ革新的な研究を生み出すために
人工知能を搭載したロボットと共存する時代は、すぐそこまで来ているのだろうか。ロボット 研究の権威・金出武雄カーネギーメロン大学教授の答えは、間違いなく「イエス」だ。ロボッ トは今後、いったいどのように人間社会と関わっていくのか。1970 年代からロボットの目と なるコンピュータビジョン(画像処理・画像認識)の先駆的研究を行い、1995 年には自動運転車 によるアメリカ大陸横断に成功した金出教授に、ロボット研究の魅力と展望について聞いた。

金出武雄Takeo Kanade
カーネギーメロン大学ワイタカー記念全学教授。国立情報学研究所客員教授。理化学研究所革新知能統合研究センター特別顧問。1945年生まれ。1973年、京都大学工学部電子工学科博士課程修了。同大学助教授を経て、1980年にカーネギーメロン大学ロボティクス研究所および計算機科学科高等研究員。1992年から2001年まで、同大ロボティクス研究所所長を務める。2016年京都賞受賞。2019年文化功労者。著書に『独創はひらめかない―「素人発想、玄人実行」の法則』(日本経済新聞出版社)などがある。

聞き手滝田恭子Kyoko Takita
読売新聞東京本社 編集局次長
1989年、上智大学外国語学部卒業、読売新聞社入社。2000年、カリフォルニア大学バークレー校ジャーナリズム大学院修了。2002年より科学部で科学技術政策、IT、宇宙開発、環境、災害などを担当。論説委員、科学部長を経て2018 年より現職。
端緒は世界初となる顔画像の処理・認識
─ コンピュータビジョンや人工知能(AI)を50年以上研究していらっしゃいます。初期の研究はどのように始まったのでしょうか。
金出 人工知能という言葉を初めて聞いたのは、京都大学工学部の3年生の時です。音声認識のパイオニアである坂井利之先生の講義で、人工知能という概念を知りました。自分でもアラン・チューリングやクロード・シャノンといったコンピュータ科学者の本を読み、「人工知能は絶対に人間より賢くなる」と確信しました。その信念はずっと変わりません。
人の知能というのは計算です。技術的用語としての「計算」というのは四則演算のことだけではありません。数字だけではなく、記号、条件判断や論理計算、センサー入力、そして外界への動作など情報処理のすべてを含みます。人は目・耳・肌などの感覚器官を通して外界の様子を物理信号として取り入れ、神経細胞ネットワークという物理的装置である脳によって記憶を参照しながら処理し、結果を筋肉などに電気信号として指令し動かしているのです。摩訶不思議な仕組みと力をもってやっているわけではありません。物理的制限が人間に比べて少ない計算機が人間を超えるのは不思議ではないと思いました。
─ 京大の大学院時代につくった画像認識プログラムが、その後のコンピュータビジョン研究につながったのですね。
金出 坂井教授の研究室で当時助教授をされていて、後に京大総長になられた長尾真先生のアドバイスで、1970年の大阪万博で集められた来場者1000人以上のデジタル画像をもとに、鼻や目、口の位置や角度などの特徴を抽出し、分類するという一連の作業をコンピュータで自動的に行うプログラムをつくりました。この博士論文の研究は、顔画像の処理と認識における世界初の本格的研究と認められました。
データは量より質が大事である
─ 顔認識は今ではごく一般的な技術になりました。GAFA(Google、Apple、Facebook、Amazon)のようにビッグデータを活用できる巨大企業や、中国のように監視カメラで国民の情報を広く集めている国では認識の精度が上がっていきそうです。
金出 顔の認識をするためにどのような特徴を使えば良いかというのは、2000年くらいまでは人間が考えていました。しかし今のディープラーニングは、たくさんの顔の画像からコンピュータのネットワークが学ぶ、よく言えば勝手に考えどんどん賢くなる。そういう意味では、多くの顔のデータを持っている企業や国は有利です。
しかし、データの数イコール精度というわけではありません。
─ ビッグデータがすべてというわけではないのでしょうか。
金出 データが重要というのは噓ではないけれど、データさえあれば何でもできるという最近の論調に私は賛成しません。大事なのはデータのクオリティ。本来解きたい問題に関係があるデータこそ重要です。
自動運転を例に挙げると、道路を何度走っても得られるデータというのは、だいたいいつも同じです。ある交差点では歩行者がいつも右から出てくる。ところが、ごく稀に左から歩行者が出てくるケースもある。この交差点のデータが右からの歩行者しか想定していないと、左からのケースに対応できず事故につながってしまいます。
では、空から車が降ってくる場合についても考える必要はあるのか。高速道路の下の道ならともかく、一般的には考えにくいですね。
あまりにも多くのケースを想定しようとすると、必要のないことにまでリソースを取られて日常の運転が危険になることもあります。だから、どこまでのデータが自動運転の実現に必要かを見極めなければなりません。
そのような視点でデータを集め、あるいは最近では人工的につくり、そのデータに対して自動運転車がどのように判断するべきだという答えとともに集める。そうした質の高いデータは、質の低いデータにはない価値があります。

1995年、自動運転車で米大陸横断に成功
─ 今、世界中で自動運転が注目されていますが、カーネギーメロン大学(CMU)で研究を始めたのは1980年代半ばでした。
金出 米国防総省の国防高等研究計画局(DARPA)の ALV(Autonomous Land Vehicle)というプロジェクトとして自動運転の研究を始めました。カメラとコンピュータを積んだロボット車が、自分で道を見つけて自動走行するというものです。
私の最初の研究計画では、1986年に開始して1年目で道路のレーンに沿っての走行、2年目には障害物の発見が可能になり、4年目には現在でいうところのレベル4(高速道路などの特定の条件のもとで人の補助なしに車がすべての操作を行う)が実現すると言って、そのための方策も「一応」示していました。そんなプロポーザルを信じて、よく資金をつけてくれたものです。
─ 研究を始めた時、どんな技術が自動運転に必要だと思っていましたか。
金出 基本的には今の自動運転車と一緒です。画像やセンサーを使って道路の位置、人、ほかの車、障害物の存在を確認し、安全な軌跡を決めて運転していくというのが基本で、それは現在も変わっていません。未熟な部分は多くあったけれど、今の自動運転の原型はできていたと言えます。
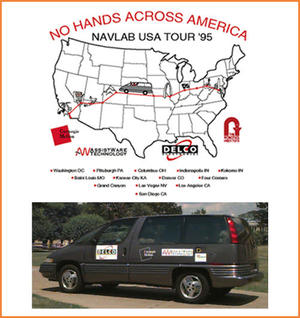
CMUの自動運転車は1995年に東海岸のピッツバーグから西海岸のサンディエゴまで、98.2%は人間がハンドルを触ることなく4500kmの米大陸横断に成功しました(図 1)。基本的には現在、高速道路で一般的に使われているレーンキープのプログラムです。だから、工事中でレーンがないような場所は走れませんでしたけれど......。
自動運転の実現を促すコンピュータとセンサーの進歩
─ なぜ、ようやく今になって自動運転の実用化が進んでいるのでしょうか。
金出 自動運転の要素技術の一つひとつが大きく進歩したからでしょう。
一番はセンサーです。カメラの性能が非常に良くなって、特に対応できる明るさの領域(ダイナミックレンジ)が広がりました。人間は急に明るいところに出てまぶしいと思っても、じきに目が慣れて見えるようになります。カメラにはそれが難しく夕日をバックに白い対向車が走ってくると見えない。トンネルの中から外を見ると真っ白になるし、外からトンネル内を見れば真っ黒。そういった弱点を克服する研究が進んで、完璧ではないけれど解像度やダイナミックレンジといったスペックが大きく向上しました。
また、LiDAR(Laser Imaging Detection And Ranging)という外界の様子を距離の画像として計測する3次元センサーも、我々が始めた時には世界で数台、画素数も少なく、1秒間に数フレーム、距離も30m先を計測できるかどうかというレベルでしたが、今は360度で100m先もリアルタイムで測れます。
コンピュータの性能向上はもちろん大きな要因です。研究を始めたころ使っていたサン・マイクロシステムズのワークステーションは当時としては演算能力が高いものでしたが、せいぜい数MIPS(Million Instructions Per Second、毎秒100万回の命令実行)というものでした。今は演算能力をギガ(10億)やテラ(1兆)の単位で測るのですからね。昔に比べて計算能力が5乗、6乗も違う。さらに画像処理やディープラーニングに適したGPUのような演算処理装置も普通にあります。
センサーとコンピューティングという二つの技術に加え、ディープラーニングという学習アルゴリズムによって認識プログラムの能力が飛躍的に進歩したことで、自動運転が現実的になったと言えるでしょう。
─ 自動運転の時代が来ると思っていましたか。
金出 運転をコンピュータが代行するのは当然だろうと考えていました。実用化にこれほど時間がかかるとは思いませんでしたが。
しかし正直に言うと、MaaS(Mobility as a Service)のように、情報通信技術を使って車や公共交通機関が連携して最適な交通手段を提供する仕組みができ、その中で自動運転の車がデータのフィードバックを受けて、さらに能力を上げていくというようなことになるとは想像していませんでした。単に車の運転の方法が変わるだけではなく、自動運転になれば社会の構造そのものが変わっていくという発想は当時はありませんでしたね。

自動運転の普及は社会の受容がカギ
─ 完全自動運転に向けた課題はなんでしょうか。
金出 「運転技術」のほかに人の行動のモデル化でしょう。自動運転と人による運転が混在する段階では特にね。
運転というのは一種のゲームです。目的地に早く着くというメリットと、事故を起こすというデメリットをトレードオフしている。事故が起きる可能性をある程度以下の危険度に抑えつつ、なるべく早く到着するという目的を最大化する。自分だけでなくまわりの運転手も同じように考えているわけで、運転はそのせめぎ合いのゲームと言えます。
車の運転では、周囲を走っている車がどのような行動を取るかがわからないと困りますね。交差点でどちらが先に行くかというのは、人同士はあうんの呼吸で決まる。自動運転の車にそれをさせようとすると、すべての車が自動運転なら信号をやり取りして次の動きを調整できるからいいのですが、自動運転の車と人の運転する車が混在している状態ではなかなか難しい。
自動運転によって交通事故率が平均的に減るのは間違いないでしょう。今でもすでにそうかもしれません。しかし、自動運転の事故率が人間の事故率より平均的に何%か低くなっても、すぐには受け入れられない。人間が運転する車と同様に、自動運転車の事故も完全にゼロにはならない。そもそも車というものの存在は、悲しい事故が起こっているにもかかわらず、その圧倒的な社会的メリットゆえに、事故に対しては保険という仕組みによって社会全体として受け入れているものですね。完全自動運転の事故率が人の運転よりもどれだけ低ければ社会は受け入れるのか。10分の1かそれとも1万分の1か、そこはまだ私にはわかりません。
「素人発想、玄人実行」で社会に役立つ研究を
─ 研究をずっとアメリカで行っていらしたわけですが、日本の研究環境との違いはありますか。
金出 アメリカの大学や研究所では、自分の研究がどう使われるかを大事にします。論文を書いただけで喜んでいても仕方ない、社会的なインパクトを与えられなければ意味がないということです。
インパクトというのは、研究したことがどれだけ世の中で使われて、貢献できているかということです。そして大学としては、世の中を変えていく中心になっていく人を、どれだけ育てたかが大事です。このことは、ぜひ言っておきたいですね。
ピッツバーグは自動運転の研究開発の一大拠点で、ウーバーテクノロジーズ、アーゴ AI、オーロラなどの企業が市内で試験走行を行っていますが、それはCMUがあるからです。大学からも多くの研究者が引き抜かれました。
アメリカでは大学の研究者がスタートアップに行ったり、そこから戻ったりと、社会とのつながりが強い。博士号を持っている人たちは大学にこもるのではなく、もっと世の中の動きに関心をもつべきです。
─ 日本の研究者はもっと社会を意識せよ、ということですね。
金出 僕が「役に立つ研究」と言うと、日本では反対する人が多い。それは応用研究の話で、基礎研究が大事であって、そもそも基礎研究というのは役に立たないものだとまでいう人もいます。
基礎研究というのも何らかの意義があるからやるのであって、なんだかわからないけれど面白そうだから研究したい、それに税金を、しかも大金を出せというのは不遜というものでしょう。
「役に立つ」という言葉が、「応用」と等しいとか、時には「便利」と同じ意味にとられて誤解されている面もあるのかな。「解く価値のある」研究というべきですかね。今までわからなかったことがわかるというのも、役に立つ研究です。それがいずれ社会にどういうインパクトを与えるのか言えるようにする必要があります。それを考えて楽しくなる気持ちがもてる研究でしょうか。
日本の研究計画書(プロポーザル)には、「自分はこういう研究をしたいから、研究資金をください」という内容のものが多いけれど、それはプロポーザルではない。研究でこういう目的のために、こういうことを解明したい、そのために技術的に何をすることが必要かと方法を書く。そして自分がやればできそうだというそれなりの根拠を示す。それがプロポーザルです。
「素人のように考え、玄人として実行する」ということが大事だと思っています。研究者の常識にとらわれずに自由に発想する。しかし、それを実現するにはプロフェッショナルとしての視点と技量が求められます。

求められるのは状況に応じて微調整できるロボット
─ ロボット研究の将来像を聞かせてください。
金出 これまでのロボットは人間の関与を減らすというのが基本的発想でした。危険な場所で仕事をさせるとか、工場での作業を無人化する、任せるという目的で自律型ロボットが開発されてきました。
これからは、ロボットが人とともに働く、人と一緒に生きる時代になると思います。運動能力だけでなく、知性でも人を超えるスーパーヒューマンと言えるロボットが登場します。人間の頭脳は今ある情報のすべては処理できない。一生の間の経験の量にも上限がある。人間の能力はある段階で飽和するけれど、ロボットにはそうした限界がない。
「最高のロボットというのは何をするロボットか」という問いがあります。「自分がしてほしいことをする」という答えが多いそうですが、私の答えは少し違う。「ロボットがするべきこと」=「自分がしてほしいこと」-「自分ができること」±Δ(デルタ)というものです。
+Δの場合は、ちょっと余分に助けてくれる。「おお、便利だな、親切だな」となります。-Δの場合は、少し助けが足りないから、人間が自力で埋めようとする。例えば、お年寄りや障害を回復中の人が自分の能力を維持しよう、回復しようとするのを助ける。マイナス方向に調整することも大事なのです。
「自分ができること」と「したいこと」のギャップを埋め、微調整してくれるのが最高のロボットという意味で、「ドクター金出の方程式」として宣伝中です。ロボットと共存する時代に向けて広がってほしい考え方です。
(写真=佐藤祐介)
インタビュアーからのひとこと
デジタル画像がない時代のこと、学部生だった金出先生は写真に細かく格子を刻み、1マスごとに明るさを示す1から10までの数値を書き込むことからプログラミングを始めたそうだ。紙テープで出てきた膨大な計算結果をテレタイプで文字に直し、締め切りぎりぎりで卒論を完成させたという。「コンピュータビジョン事始め」から半世紀。画像認識も自動運転も、地道な取り組みと改良の積み重ねが社会を変えていくのだと納得した。