Dec. 2019No.86
Article
ロボットから人の知能の謎を解き明かす
空気を読んで協調作業するために必要なこと
ロボットが「空気」を読んで、人の生活をサポートする時代は訪れるのだろうか─ 。そんな未来を実現するためには、ロボットそのものが人のように考え、判断する必要がある。NIIの村田真悟助教は、「予測誤差最小化」の研究に取り組むなかで、人の知能や脳の仕組みを探究。その成果の一部をロボットに応用することで、研究を加速させようとしている。

村田真悟Shingo Murata
国立情報学研究所 情報学プリンシプル研究系 助教/総合研究大学院大学 複合科学研究科 助教
人間の認知機能は「予測誤差最小化」に基づく
村田助教のロボットへのアプローチは、「役に立つロボットをつくる」ことではない。人の知能や脳の理解をめざした研究をするなかで、ロボットを活用し、その仕組みの検証を行うというものだ。いわばロボットは、知能や脳を知るためのツールにすぎない。だが、この取り組みが、「空気」を読んで人と自然にインタラクションができるロボットを生む近道になる可能性がある。
村田助教が取り組んでいるのは、「予測誤差最小化」の研究である。これは、いまでは認知ロボティクス研究の一つのテーマに位置づけられているが、もともとは認知神経科学の分野で提唱されている原理である。村田助教は次のように説明する。
「人は会話をする際に、相手からどんな返事がくるかを予測しています。しかし、その返答が予想外の内容であった場合に、人は驚くことになる。これが予測誤差です。学習という行為は、長い時間軸で蓄積した予測誤差を最小化するようにシナプスの結合を調整するものであり、行動は、短い時間軸で生じた予測誤差を解消するためのもの。そして、知覚も同様に短い時間の予測誤差を最小化するためのものです。つまり、人は予測と違うことが生じたら、その誤差が小さくなるように学習をしたり、行動をしたりしているわけです。
そして、認知神経科学の権威であるカール・フリストン氏は、自由エネルギー原理と呼ばれる脳の統一原理を提唱するなかで、この予測誤差最小化によって、人のすべての認知機能を説明できると述べています。そこで、私はこうした予測誤差を最小化するための仕組みを、ロボットを使って実験しようと考えているのです」

予測誤差を最小化するロボットをつくる意味
仮に、予測誤差最小化が人のすべての認知機能につながるとすれば、乳幼児が親や兄弟などの他者、まわりの環境などとのインタラクションを通じて、学習し、判断していくことにも説明がつく。
また、人が他者と共同作業する場合も、予測は大事なメカニズムになる。相手の意図を推定して行動すること、予想外のことがあるとそれを理解して判断すること、そしてまた、他者の意図を推定し直して、それに基づいた協調行動を実現することになるからだ。
これは、人と協調作業をするロボットでも同じだ。特定の用途に利用するロボットであれば、事前に起こりうる状況を想定し、そのためのプログラムやアルゴリズムを組み込んで稼働させればいい。しかし、人と協調してコミュニケーションをしたり、作業をしたり、あるいは「空気」を読んで人をサポートするロボットの実現には、その場その場で判断して、行動する能力が必要になる。人の行動や考え方、作業のプランが変わったときにも、それをロボット自身が認識し、判断して、人を支援しなければならない。しかし、事前に想定した状況のみに対処可能なプログラムやアルゴリズムで、そのようなロボットを実現するには限界があるだろう。
そうした意味でも、認知ロボティクスや予測誤差最小化といった研究は、人の支援に役立つ未来のロボットの実現には不可欠な研究と言っていい。「どんな状況でも予測誤差を最小化できるロボットをつくり上げれば、人のような認知機能を獲得して、その結果、人の役に立つロボットをつくることができるかもしれません」と村田助教は語る。
実は、自閉スペクトラム症をはじめとする発達・精神障害を有する人たちを理解したり、そのような人たちとコミュニケーションしたりする手立てとしても、予測誤差最小化は有効だという。例えば自閉スペクトラム症の原因の一つに、予測誤差の 精度の推定がうまくできないことがあげられている。この仮説を、モデルに組み込んでロボットで学習実験を行うと、自閉スペクトラム症のようにふるまうロボットができあがるという。
予測に対して、絶対的な自信があるときほど、外れたときの誤差に対する係数が大きくなる。逆に自信がないときは、予測が外れてもそれほど驚きはない。言い換えれば、誤差の重みづけを変えることによって、ふるまいを変えることができる、というわけだ。これも人を理解する一つの取り組みである。村田助教は、精神医学の研究者らとともに、こうした研究にも取り組んでいる。
情報学の貢献と究極のロボット
ロボットに予測誤差最小化の機能を埋め込むのに有効なのが、深層学習の一つであるRNN(Recurrent Neural Network)であ る。これは、再帰結合をもったニューラルネットワークであり、簡単にいえば、過去の状況を把握しながら時系列データを扱うことで、文脈依存の予測を行って、出力するというものだ。
ロボットに応用すると、腕を上げ下げする際の角度や視覚などの情報を、過去の状況をもとに予測して、腕を正しい方向に、正しい角度で動かすことができるようになる。ロボット自らが、過去の履歴データを利用することで、よりよい予測や判断ができるようになるというわけだ。
「私が学部4年生として卒業研究を始めた9年前は、ニューラルネットワークの研究を行うにもツールがなくて、一からつくる必要がありました。TensorFlowやPyTorch といったライブラリが出てきたことで、ロボットの発展に向けた研究が簡単に始められるようになり、障壁が低くなりました」と村田助教。
また、画像や音声などのマルチモーダル情報を取り扱う情報学の要素技術との組み合わせも、ロボットの発展に貢献する可能性があるという。
「例えば画像認識によって椅子を理解するだけに留まらず、身体をもつロボットが、身体を通じた体験を積み重ねることで、椅子は座るためのものという概念が生まれ、状況によっては、机のような形でも椅子として使えることを理解できるようになる。これを一つひとつ記述するのではなく、ロボットが身体を通した経験で理解することが可能になれば、もう一段上の評価や発展をさせるためのプラットフォームとしてロボットを有効に使うことができるようになります」
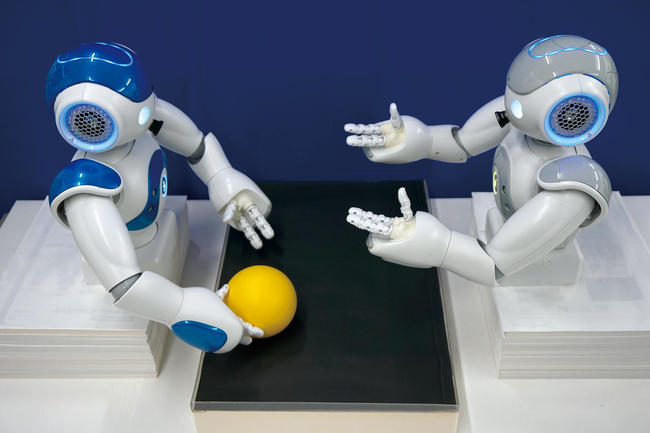
写真1|ロボット同士のインタラクション。
動画|学習した二つの動きを、予測誤差最小化に より自律的に切り替える様子が見られる。
現在、村田助教は研究の過程で、2台のロボットを使った予測誤差最小化によるコミュニケーションの実験を行っている(写真 1)。ロボット同士が向かい合い、相手からボールが転がってきたらそれを返すという行動と、ボールが手元に止まってしまったら、両方の腕でボールを左右に転がすという行動だけをロボットに学習させておく。最初はボールをお互いに転がしあっているが、摩擦などの影響で、手元でボールが止まって しまった場合、相手がボールを転がしてくるという予測に誤差が生じる。そこで、その誤差を解消するために、ロボットが左右にボールを転がすことで、誤差が小さくなり、行動が落ち着くことになる。ここでは、ロボット自らが誤差を判断し、学習させていない「切り替え」という行動によって、誤差を解消する動きが見られる。
しかし、現時点では、ロボットが「空気」を読むレベルまでには、かなりの道のりがあるのも確かだ。
では、「空気」を読むロボットとは、いったいどのようなものなのだろうか。
「究極のロボットとは、すべてのことを、人間に代わって行うことができるものかもしれません。でも、それは空気を読むロボットとは違うでしょう。ロボットができることであっても、実は人は自分でやりたいと思っているかもしれません。あるいは、リハビリ支援のロボットであれば、なんでも手厚くやるのではなく、人が能動的に取り組むように仕向ける必要もある。人の意図や気持ち、立場を理解して、判断することが未来のロボットには求められるのではないでしょうか」
(取材・文=大河原克行 写真=佐藤祐介)