Jun. 2023No.99

Article
説明可能な「安全・安心」の手法を提案
自動運転の安全性を厳密に証明する――。国立情報学研究所(NII)アーキテクチャ科学研究系の蓮尾一郎教授らの研究チームは、科学技術振興機構(JST)の戦略的創造戦略推進事業ERATO蓮尾メタ数理システムデザインプロジェクト(ERATO MMSD)[注1]のもと、自動運転システムの安全性を数学の手法で保証する新たな手法を開発した。世界で開発が進む自動運転の安全確保の方法論を大きく変える可能性を秘めている。

蓮尾 一郎HASUO, Ichiro
国立情報学研究所
アーキテクチャ科学研究系 教授

取材・執筆吉川 和輝YOSHIKAWA, Kazuki
日本経済新聞編集委員
九州大学卒業後、日本経済新聞社に入社。産業部、ソウル支局、科学技術部長、日経サイエンス社長などを経て 2015 年から編集委員として科学技術分野を取材。1997 ~ 98 年、米マサチューセッツ工科大学・科学ジャーナリズムフェロー。
現実のドライブシーンに合ったシナリオ
自動運転システム[2]の開発は現在2つの流れで進んでいる。1つは決まったルートを運行する「次世代交通サービス(MaaS型)」の自動運転。ドライバーのいない車両を遠隔監視で運行する方式が多い。2023年に国内で初めて「レベル4」自動運転の認可を受けた福井県永平寺町の7人乗り車両による移動サービスなどが代表例だ。
もう1つは公道を走る乗用車などの自動運転。先進運転支援システム(ADAS)と呼ばれる機能を強化・充実させる方向で開発が進んでおり、2020年にホンダの高級車レジェンドが公道走行では世界初となる「レベル3」の認証を得た。ここでは高速道路で渋滞に遭遇して速度が30km/hを下回ったときシステム側に運転を任せられるという条件が付いていた。
こうした自動運転の走行ルートや速度制限などの条件は「運行設計領域(ODD)[3]」と呼ばれる。MaaS型、自家用車型のいずれもODDを今後段階的に緩和して最終的にはいかなる状況でもシステム側に運転を完全に任せる「レベル5」自動運転を目指している。
自動運転が普及すると、ヒューマンファクター(人的要因)を無くせるため交通事故が減るという期待がある。だが人工知能(AI)が運転を担っても、各車が自律的に走行するという枠組みの下では、事故をゼロにはできない。ODDの条件が緩和されて自動運転の 領域が広がるにつれて安全確保の難易度も上がる。
また、自動運転車は安全性の確保と快適な走行のバランスをとるのが難しいという課題がある。走行時に依拠する運転シナリオが安全を重視するあまり「石橋を叩いて渡る」式のものになってしまうとクルマの動きは鈍くなり、快適なドライブとはほど遠いものになる。
もし安全性が証明された運転シナリオを、様々な走行の局面に対応する形で用意することができれば、こうした課題は解決されるだろう。蓮尾教授らの今回の研究成果はこの要請にこたえるものだ。数学や論理学の手法を駆使することで、安全性が厳密に証明され、かつ現実のドライブシーンに合った運転シナリオを開発する手法を編み出した。
安全条件を切り分けたRSSという発想
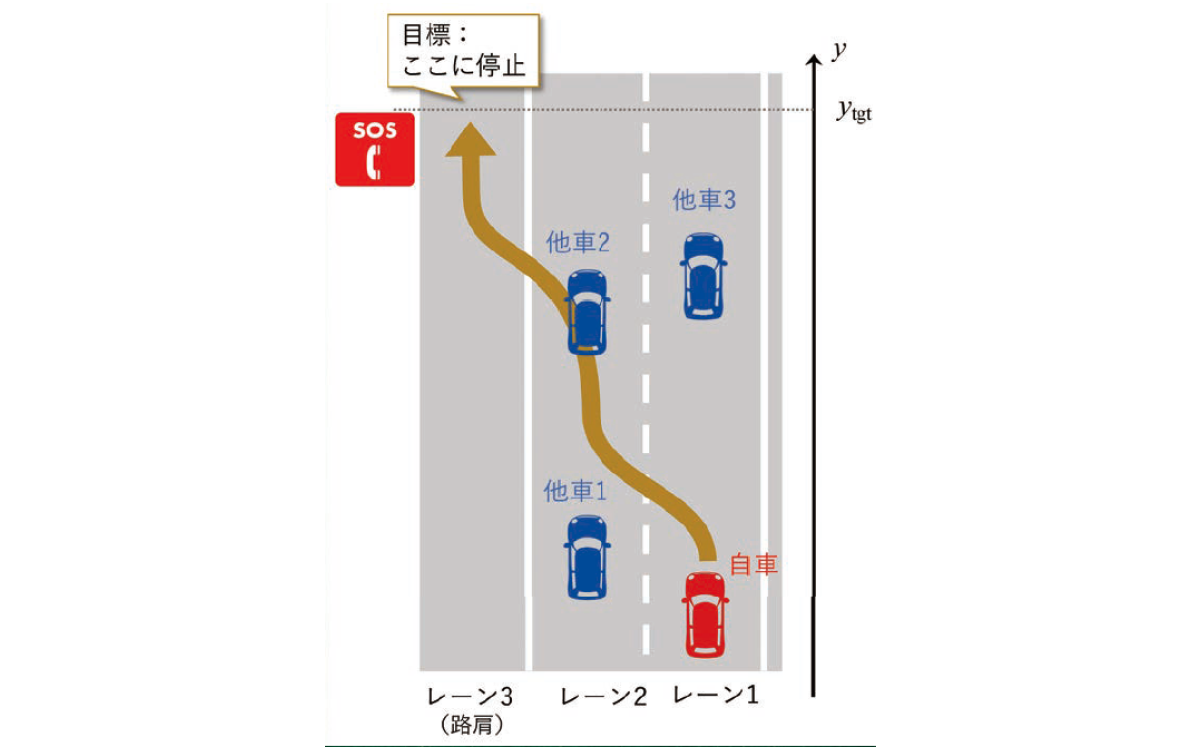
蓮尾教授らが実際に作成した運転シナリオは例えば次のようなものだ。片道2車線の高速道路の追い越し車線を走行中の自分のクルマ(自車)が、周囲のクルマ(他車)と安全な距離を保ちながら車線変更をして走行車線に入った後、左端の路側帯(路肩)に安全に停止する ――。
これは、走行中何らかの事情で道路脇の非常電話の場所にクルマを停めるとか、運転主体をシステムから人間に切り換える際に人間の側の準備ができていない場合いったん停車するといった状況に対応する、自動運転の運転シナリオの中でも重要なものの1つだ。
このケースでよくある走行パターンは、左車線を走る他車の後方に入るために速度を調節して車線変更のタイミングをうかがうというものだ。他車と接近するリスクを警戒してうまく車線変更ができず、停車のタイミングを逃してしまうことも起こる。
これに対して、開発した運転シナリオではよりスムーズな走行が実現できる。他車の速度や位置関係から判断してタイミングよく車線を変えたり、場合によっては速度を落とすことなく逆に加速して、左の車の前方に回り込むような形で車線を変えたりする。こんな大胆にも見える走行ができるのは、他車と危険な状況に陥らないことが証明済みの運転シナリオになっているからだ。
この安全証明のために採用したのが「責任感知型安全論(Responsibility-SensitiveSafety, RSS)」という方法論だ。各車が加速や減速、車線変更など状況に対応した適切な走行をすることを責任ルールとして決めておき、このルールが守られるという仮定の下、数学の定理を証明するように「衝突が起きない」ことを厳密な形で保証するというものだ。
RSS はこうした条件付きの安全証明であり、それで事故が完全に防げるということにはならない。他車の無謀な運転などによって事故に巻き込まれることはありうる。そうした自車の側の責任では避けようがない条件を切り分けた上で、その範囲で安全性を厳格に証明できるようにしようというのが RSSの思想だ。
RSSを数学・形式論理学で拡張
こうした前提条件付きの安全保証には大きな利点がある。用意された運転シナリオでもし事故が起きた場合、その原因は関与する車のどれがルールを守っていなかったためだと推定でき、責任の所在が明確になる。蓮尾教授は「RSS は法規制や損害保険の仕組み、業界標準など自動運転の普及に向けた制度設計を進める上でも好都合な枠組みを提供できる」と強調する。
RSSは 2017 年に米インテル傘下のイスラエル企業モービルアイ(Mobileye)の研究者が提案したのが最初だが、蓮尾教授によると「数学や論理学の視点からの発展の余地が大きいものだった」という。同社が示した RSSルールの例も、同一方向に走行するクルマの追突を回避するという単純なケースだけにとどまっていた。
RSSの理論的な根拠を検討して一般化し、複雑な運転シナリオにも自在に応用できるようにしたのが蓮尾教授らの成果だ。RSSを数学の一分野である形式論理学によって拡張することを試みた。RSSの証明を形式化するという作業を行ったが、これを簡単に言うと、従来人が紙に書いて行っていた数学の証明をコンピュータでできるようにすることだ。
ソフトウエア研究の分野で知られる「ホーア論理(Hoore,Logic)」を拡張した「微分フロイド・ホーア論理(Diffential Floyd-HooreLogic,dFHL)と名付けた形式論理の体系を提案。これで自動運転車の複雑な行動計画を分割して逐次的に解析できるようになり、RSSの適用範囲を大きく広げることに成功した。新たに開発した手法は「GA-RSS(Goal-AwareRSS)」と名付けている。
研究チームはマツダと協力して、自動運転車を制御するコントローラに RSSを実装する研究も行った。「通常系」と「安全系」の2タイプのコントローラを状況に応じて切り替える方式。通常系コントローラで車の性能を生かした快適な走行を実現する一方、安全を重視すべき局面では安全系コントローラに切り換える。この切り換えにもRSSルールが適用される。
事態打開の可能性を秘める新しい枠組み
現実の実際の自動運転ではこうした運転シナリオはどれほどの数が必要なのだろうか。蓮尾教授は「固定ルートでも高速道路の場合でも、運転シナリオ数は数百で収まるだろう」という見通しを立てている。プロジェクトでは新規の運転シナリオ作りを検討するとともに、シナリオ作成の自動化を目指した研究も併せて進めているという。
自動運転システムの開発ではデータの量がモノをいうといわれる。自動運転の開発企業は実験車両を様々な条件で走らせたり、仮想現実(VR)空間で走行シミュレーションを実施したりして、膨大なAIの学習データを収集している。こうした取り組みで日本は海外のトップランナーに大きな差を付けられている。
だが衝突回避など人命にかかわる安全性確保の分野は、走行テストやシミュレーション、あるいは過去の事故統計を参照するといった方法では、安全性をユーザや社会に説明可能な形で示すのが難しく、これが自動運転の本格普及の足かせにもなりかねない。こうした状況を打開する可能性を秘めた全く新しい安全・安心の枠組みが日本発で生まれようとしている。
[1]蓮尾メタ数理システムデザインプロジェクト
科学技術振興機構(JST)の戦略的創造研究推進事業 ERATOに採択されている研究プロジェクトで、Society 5.0の柱である物理情報システム(CPS)の品質保証手法などを研究している。自動運転システムはその重点応用分野に位置づけられている。
[2]自動運転システム
自動車を運転する3要素である認知、判断、操作を自動で行うシステム。車載センサなどで周囲の状況を把握しながら運転操作をする。政府は米自動車技術者協会(SAE)の基準をもとに、運転支援に当たるレベル1から完全な自動運転であるレベル5まで分類している。
[3]運行設計領域(ODD)
自動運転システムが正常に作動する前提となる設計上の条件のこと。高速道路か一般道か、車線の有無といった道路条件、都市部か山間部かなどの地理条件、天候や日照など環境条件のほか、保安要員の乗車の有無や速度制限ーーなど内容は多岐にわたる。
関連リンク
関連リリース
2022/07/07 自動運転車の安全性に数学的証明を与える新手法を開発~論理的安全ルールの効率的導出により自動運転の社会受容を加速~