
研究背景・目的
日常環境でのユーザの生活支援を目的とする知能ロボットの実現のためには、様々な空間的・身体的な状況に対応する判断能力と適切な対応行動を学習する必要があります。しかし、近年の機械学習の主流となっている深層学習などを直接応用することは困難です。その理由は、学習に必要となる大量の経験データを収集するコストが膨大であることです。特に適切な対人行動の経験サンプル採取のためには、実際の人間がロボットと共同作業を長時間行う必要があり、効率的ではありません。そこで、効率的に対人行動経験から適切な行動を学習するために、クラウド型のVRプラットフォームを開発し、ユーザと対話しながら学習し、生活を支援する知能ロボットの実現を目指しています。
研究内容
実際のユーザーがVR空間上で、社会的・身体的なインタラクションを仮想の知能ロボットと行うため、知能ロボットのソフトウェア開発のミドルウェアである「ROS」(Robot Operating System)と、VRアプリケーションの開発プラットフォームである「Unity」を統合したソフトウェア基盤「SIGVerse」を開発しました。これにより、ロボット開発者は従来までのロボットソフトウェアを改変することなく、VR空間に知能ロボットシミュレーターを再現し、ユーザーがクラウドを介して仮想ロボットと身振り手振り・ジェスチャー・音声対話などを用いた身体的・社会的な対話を行うことが可能になります。現在は、ユーザーの実演に基づく模倣学習の効率化、日常生活に関わる概念の対話的学習などの研究を展開しています。
産業応用の可能性
人と知能ロボットの対話行動だけでなく、人と人の対話行動を蓄積することも可能であるため、例えばスポーツ動作や特殊技能の訓練のための経験コーチングシステムへの応用が考えられます。第一人称視点で自身の運動と理想的な運動の差異をVR上で確認することで、効率的な訓練を実施することが期待されます。また、片麻痺の患者のためのリハビリシステムとして、視覚映像で実際の身体の動きとは異なる理想的な動作を提示することによって、回復を促すニューロリハビリテーションの基礎研究を科研費の新学術領域研究で進めており、在宅でのVRを活用したリハビリシステムへの応用も期待できます(図)。
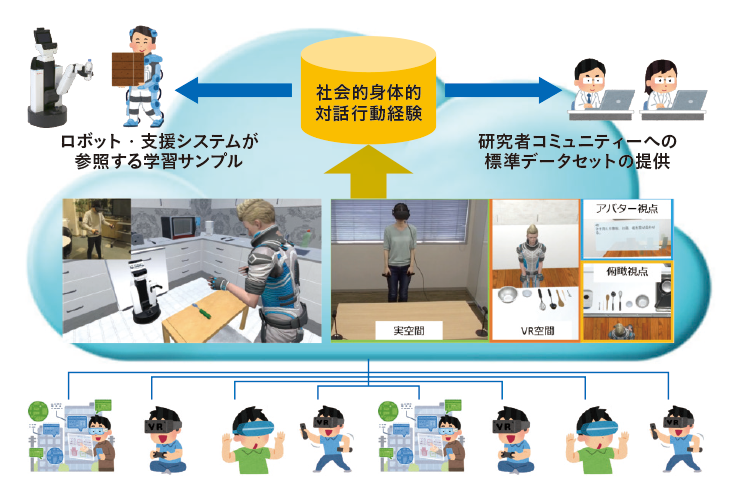
図)クラウド型VRによる社会的・身体的対話経験の蓄積と利活用プラットフォーム
クラウド型VRプラットフォームの構成図)ユーザーは任意の場所からクラウド上の知能ロボットとの対話実験システムに参加することが可能です。収集された社会的・身体的な対話経験はオープンなデータベースとして蓄積され、知能ロボットのリアルタイムな学習に用いる事が可能で、研究者コミュニティーへ提供することも可能です。