
人と協働する自律型ロボットには、複雑で柔軟な行動ができたり、不確実な環境下でも適切な判断ができたりする能力が必要です。人間の認知情報処理を参考に、感覚・運動情報の予測メカニズムをモデル化することにより、ロボットの知能化技術を開発しています。
研究背景・目的
私たちの生活環境において人と共存し活躍する自律型ロボットの実現が期待されています。しかしながらそのためには、工場内等での単純な繰り返し作業とは異なり、文脈に依存した複雑かつ柔軟な行動生成や不確実な環境下における適応的な判断といった技術的課題を解決する必要があります。起こりうる状況の全てを事前に想定し、ルールを記述しておくことは現実的に不可能であるため、ロボットが自らの感覚・運動の経験を学習し一般化することで必要な機能を獲得する仕組みが鍵となります。本研究では、特に人間の認知情報処理を参考にし、その実現のために重要であるとされている感覚・運動情報の予測メカニズムに着目し、ロボットの知能化技術を開発しています。
研究内容
時系列データを扱うことが可能な再帰型神経回路モデル(Recurrent Neural Network: RNN)をベースとした、ロボットの感覚・運動情報の予測学習を行うための深層生成モデルの構築を行っています。モデルには、時間的階層性が導入されており、複雑な時系列データを要素単位に分解しその組み合わせとして表現することが可能です。また、データに含まれる様々なレベルの不確実性を推定することも可能です。構築したモデルをロボットに実装し、模倣学習、人の言語指示による物体操作、状況変化に対する適応的行動生成、人とロボットによる協調組み立て(写真1)、ロボット同士のインタラクション(写真2)等に関する研究を行っています。
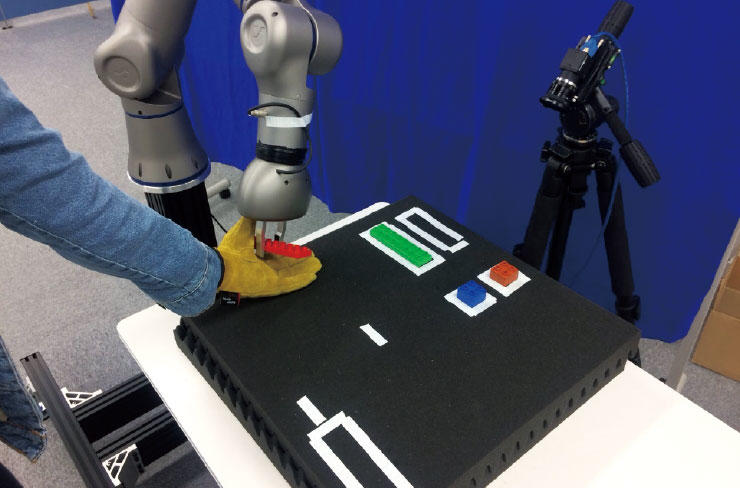
図1 人とロボットによる協調組み立て
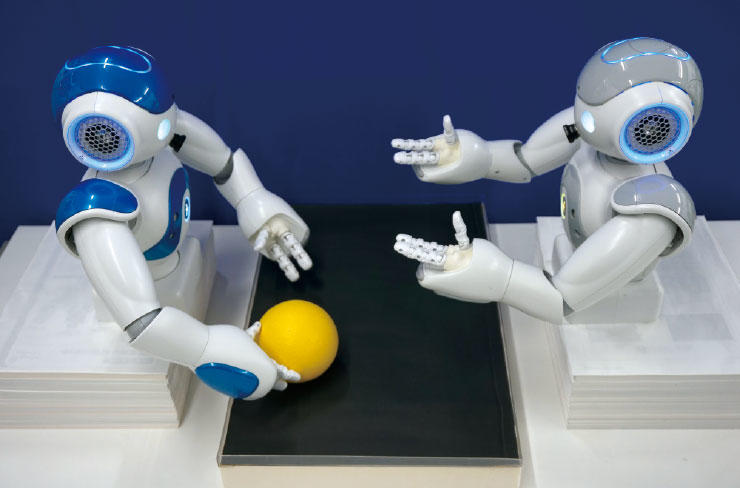
図2 ロボット同士のインタラクション
産業応用の可能性
人との円滑なインタラクションやコミュニケーションを目的とした自律型ロボットへの応用が期待されます。また、産業用ロボットにおいても、事前にルールを記述することが困難な問題に有用であるといえます。例えば、熟練作業において、模倣学習によって熟練者の動きだけではなくそのスキルまでをロボットに獲得させることが例として挙げられます。さらには、提案モデルの応用先として、ロボットの行動生成のみならず、歩行者の行動予測や生体情報の特徴量抽出といった、時間依存性を考慮する必要のある複雑な時系列データを扱う問題全般が挙げられます。
研究者の発明
❖"Learning to Reproduce Fluctuating Time Series by Inferring Their Time-Dependent Stochastic Properties: Application in Robot Learning via Tutoring "
Shingo Murata, Jun Namikawa, Hiroaki Arie, Shigeki Sugano, and Jun Tani
IEEE Transactions on Autonomous Mental Development, Vol. 5, Issue 4, pp. 298-310, 2013.
DOI: 10.1109/TAMD.2013.2258019